ロボットの製作に伴う、材料、部品と組立てについて紹介します。
ロボット製作材料
駆動系
DCモーター&ホイール
駆動系に使用したDCモーターとホイールです。
製品名:ロボットプラスチックタイヤホイール DC 3-6Vギアモーター

仕様:
•電圧:6V
•無負荷回転速度(6V):100 RPM
•定格電流:<300mA
•最大トルク:800k.cm
•モーター減速比:1:48
•エンジンサイズ:約6.5*2.2*1.8cm
•ホイールサイズ:65*27MM
価格:169円(2個セット)
モータードライバー
製品名:デュアルHブリッジ DCステップ モーター ドライバー コントローラー ボード
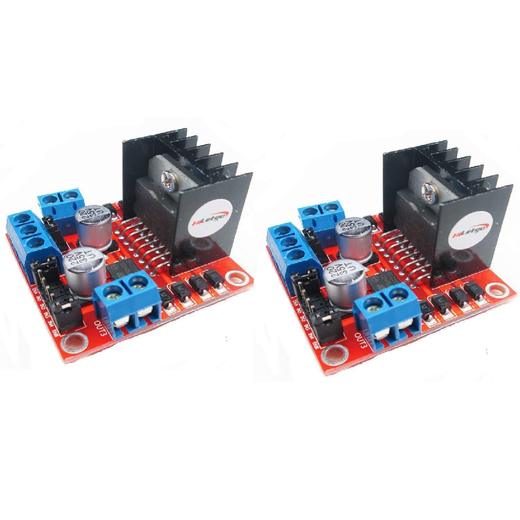
仕様:
•モータードライバーIC:L298
•電源電圧:6.2~46V
•最大電流:2A(放熱器付き)
•Hブリッジ制御(2個のモーターの正転・逆転、ブレーキ、フリーの制御)
価格:215円(2個セット)
制御系
制御用マイコン
ロボットを制御するマイクロコントローラです。
製品名:Arduino UNO R3開発ボード(Arduinoと互換品)

仕様:
•デジタルI/O:0~13
•アナログ I/O:0~5
•出力電圧:5V DC、3.3V DC 切り替え可能
•電圧:5-9V(ACアダプタ)
•SMD MEGA328P-AUコントローラ
•ATMega16U2からCH340Gにアップデート
•ISPダウンロード機能
•オリジナルのUNO R3より高性能
•USBでパソコンに接続 (ケーブル付属)
•基板サイズ:73*52mm
価格:458円
WEBサーバー用マイコン
WEBサーバーとして使用するマイクロコントローラです。
製品名:Wi-Fiモジュール ESP-WROOM-02 DIP化キット

仕様:
•デジタルI/O:9点
•アナログ I/O:1点
•電源電圧 3.0-3.6V
•フラッシュ 2MB
•消費電流 平均 80mA
•対応WiFiプロトコル 802.11b/g/n (2.4GHz)
•18mm×20mm×3mm
•Wi-Fi mode station/softAP/SoftAP+station
•セキュリティ WPA/WPA2
•暗号化 WEP/TKIP/AES
価格:650円
センサー系
リミットスイッチ
前方に取り付けたバンパーが壁などに接触した時にスイッチ信号として入力するマイクロリミットスイッチです。
製品名:マイクロリミットスイッチローラレバーアーム
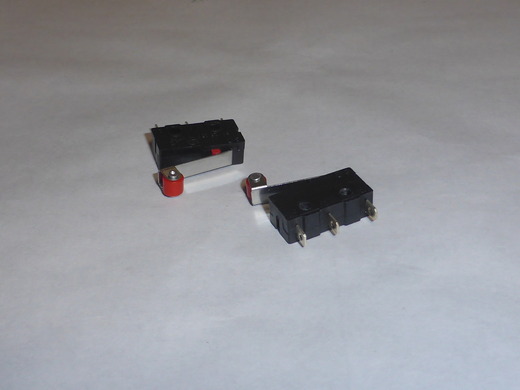
仕様:
接続タイプ: 1NO + 1NC
材料: プラスチック,金属
アーム:ローラレバー:
定格負荷: AC 1A 125V
価格:200円(10個入り)
反射型フォトインタラプタ
床面の検出をします。もし、走行面が途切れたら、床面との距離が一定以上になったことをロボットに知らせます。
製品名:反射型フォトインタラプタ GP2A200LCS

仕様:
・検知距離:2~22mm
・電源電圧:5V標準
・消費電流:30mA最大
・出力電圧:30V最大(オープンコレクタ出力)
・コネクタ:タイコエレクトロニクスアンプ、292133-3
・重量:約1.95g
価格:350円
超音波測距センサー
壁面との距離を計測します。左右にひとつずつ計2個取り付け、自動モードの時に、左右の壁面からの距離を計測しながら、走行します。
製品名:HC-SR04 超音波距離センサーモジュール HC-SR04
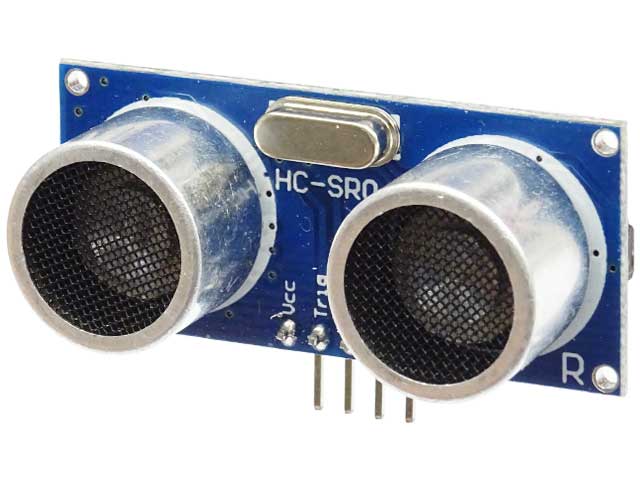
仕様:
・測距範囲:2~400cm
(センサー基板正面を中心とした15度の範囲、分解能:0.3cm)
・電源電圧:DC 5.0V
・動作電流:15mA
・動作周波数:40kHz
・トリガ信号:10μS(TTLレベルのパルス波)
・エコー出力信号:反射(往復)時間
・サイズ:45×20×15mm
価格:250円(2個)
掃除機構系
回転ブラシ
掃除機能としてゴミを内側に集めて吸引するため、ロボット前面に下記写真のような回転ブラシを2個作り、取付けました。
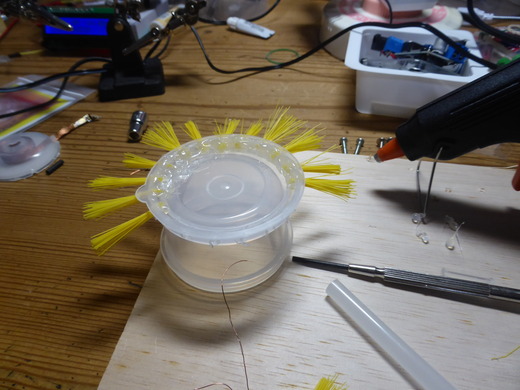
材料は百均で買ったプラスチック容器の蓋と掃除用ブラシを利用し、まず、蓋に穴を明け、短く切ったブラシの束を差込み、グルーガンで固定しました。次に回転ブラシの中央に、穴を明け、DCモーターに取付け回転させます。
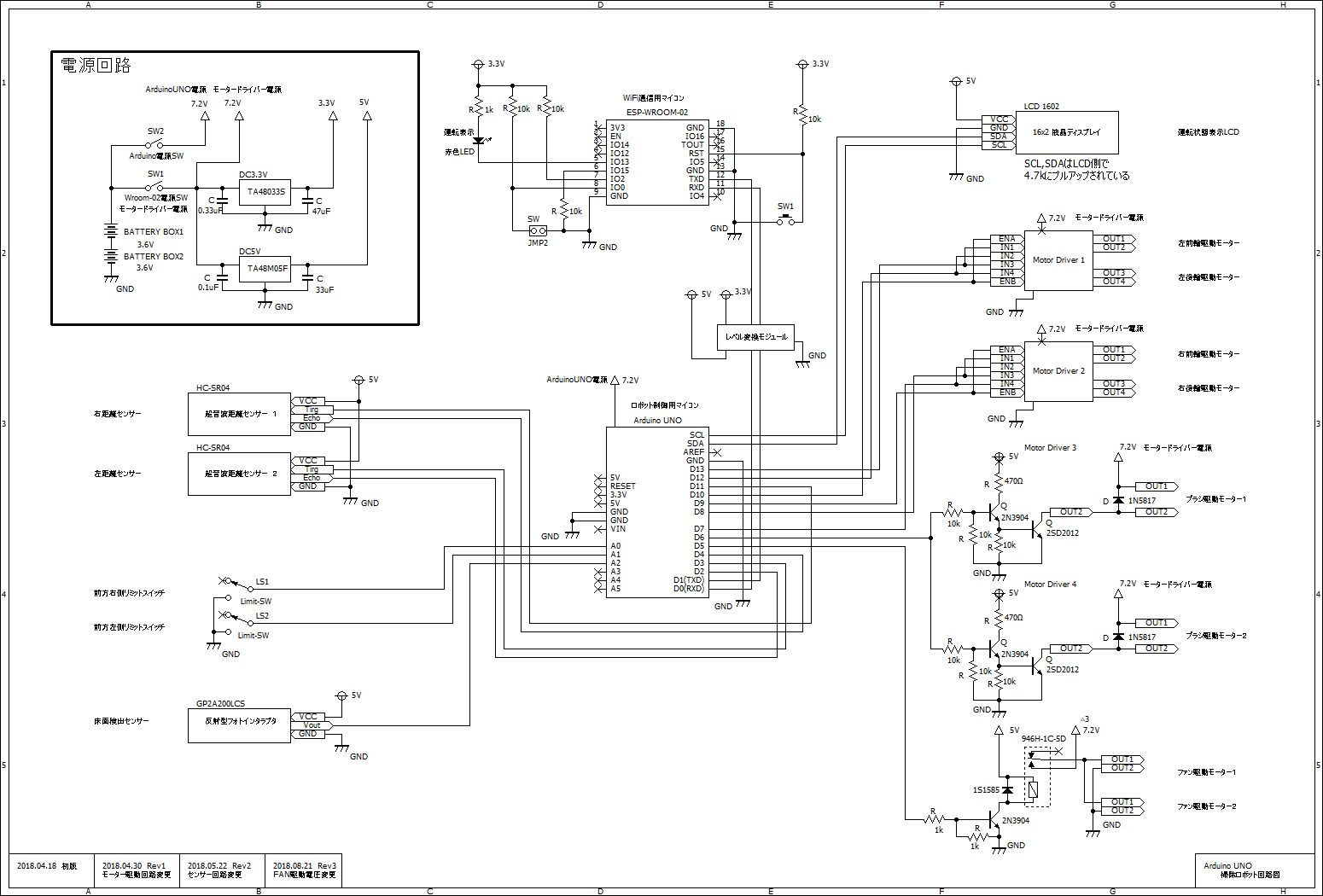
回転には、駆動系で使用したDCモーター&ホイールのモーターのみを使用しています。ただ、ドライバーは回転方向が一定方向のみなのでトランジスター回路で構成しました。(回路図を参照ください)
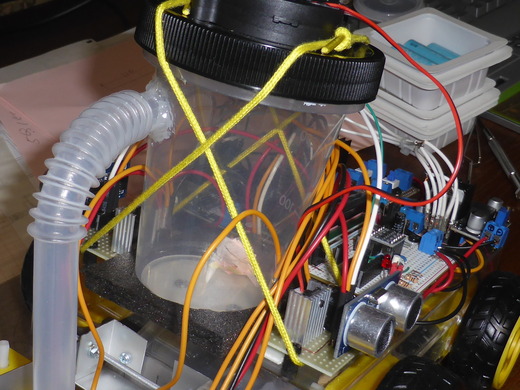
サイクロン吸引機
吸引機構はサイクロン式とし、下記写真のようなサイクロン吸引機を作りました。
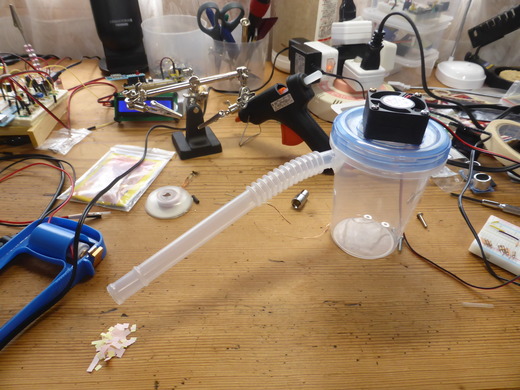
材料は、百均で買ったコーン状のプラスチック容器と手動の石油ポンプのホースを利用し、プラスチック容器の側面に穴を明け、石油ポンプの蛇腹ホースを短く切って、グルーガンで固定しました。
ターボブロワー
吸引機にはブラシレスDCモーターを採用したターボブロワーを使用しました。
ターボブロワーの電源はDC24vなので、リレーにて駆動しています。
製品名:ブラシレス DC 24V 0.15Aターボブロワー冷却ファン

仕様:
•定格電圧:DC 24V
•定格電流:0.15A;
外部材質:プラスチック
•カラー:ブラック
•コネクタ:2ピン
•サイズ:5 x 5 x 1.5cm
•ケーブル長さ:29cm
価格:218円
電源系
電源は、充電式ニッケル水素電池(単三)6本を使い、回路図にあるように、マイコン、センサー用にDC3.3V、DC5Vを作っています。
一方、ホイール駆動用DCモーターには、全電圧(約7.2V)を供給しています。また、吸引機用ターボブロワーは、DC24V駆動なので、下記昇圧レギュレーターを使用しています。

仕様:
モデル:XTW6009ブーストモジュール
•入力電圧:3V-32V
•出力電圧:5V-35V
•出力電流:4A(最大)
•サイズ:43mm*21mm*14mm
価格:179円
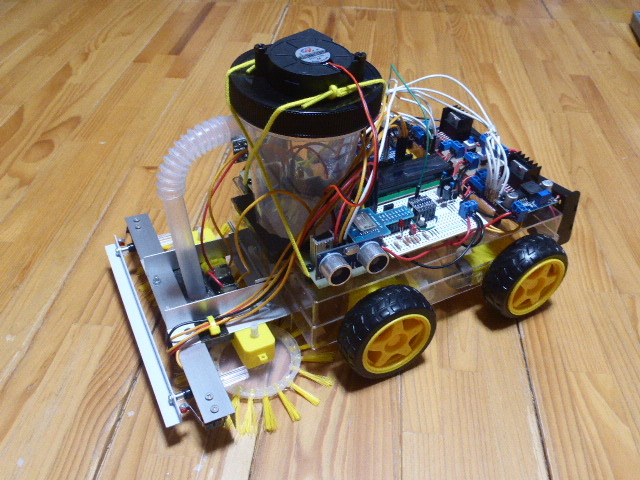
組立て
シャーシへの車輪の取付け
シャーシ(車体)は、百均で買ったプラスチックケースを用い、ホイール付きモーターを取付けました。
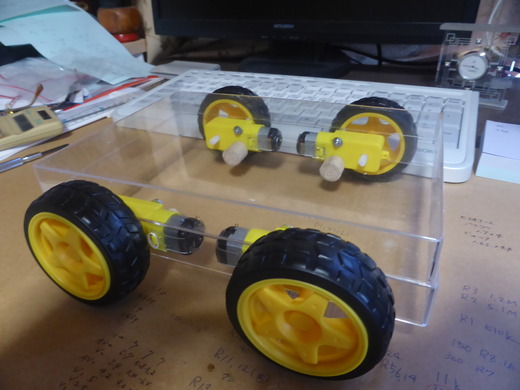
アクリルケース:
サイズ:幅153mm×長さ217mm×高さ42mm
材質:透明アクリル製
価格:100円
各種基板および電池ボックスのシャーシへの取付け
シャーシに、各種基板や電池ボックスを取付けます。
各種基板とは、マイコン基板2枚(ArduinoUNO、ESP-Wroom-02)、モータードライバー基板2枚、LCDディスプレイ基板1枚、スイッチ基板1枚、超音波センサーと回転ブラシドライブ回路基板2枚(内1枚はリレー駆動回路を含む)、昇圧レギュレータ基板1枚の計9枚です。
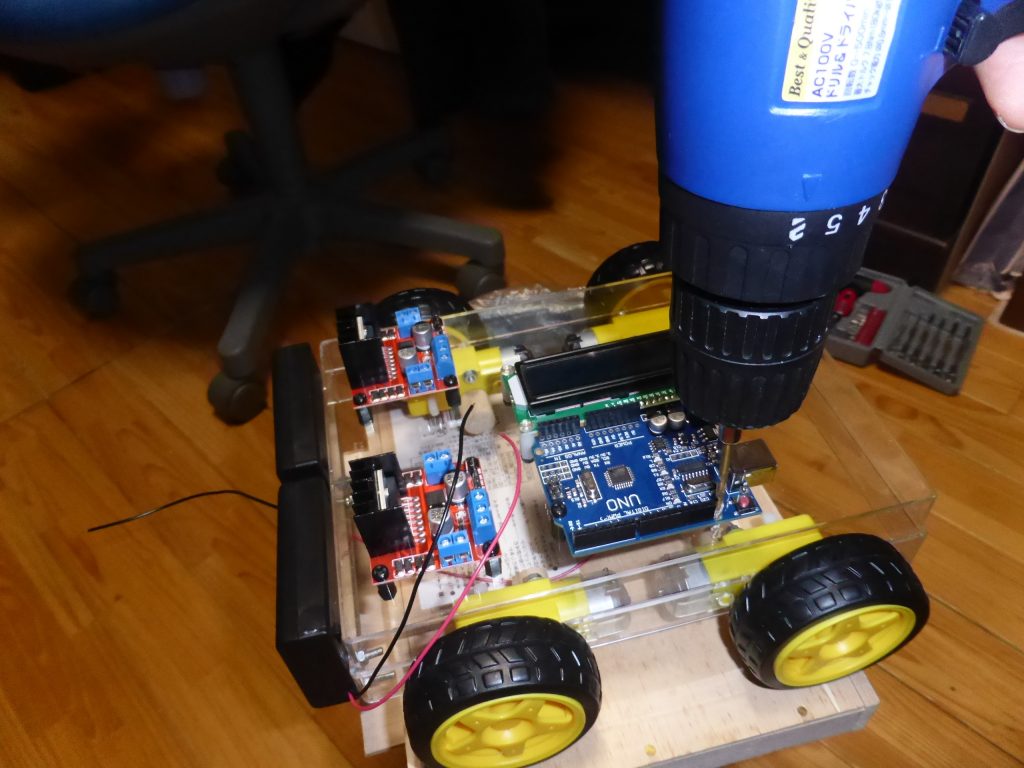
それぞれ位置を決め、穴あけをして取付けます。電池ボックスは、車体後部に取付けました。
バンパー・回転ブラシ保持機構の組付け
バンパーはアルミ形材で作り、回転ブラシやセンサーなどを取付けました。
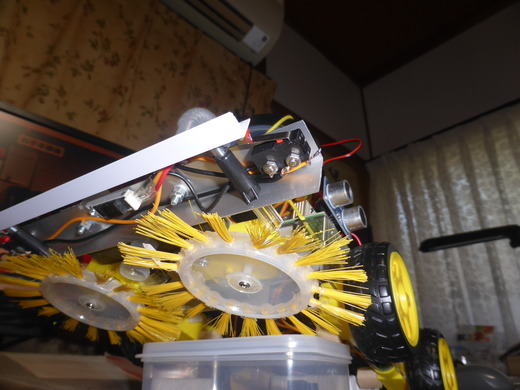
写真は前方部を下から見たもので、アルミ製アングルに回転ブラシ&モーターを取付け、その前方にはバンパー(PVCアングル)をリミットスイッチを介して取付けています。
また、アルミ製アングルの中央には、床面との距離を検出する反射型フォトインタラプタを取付けています。
サイクロン吸引機の組付け
吸引機構はサイクロン方式を採用し、掃除機構の2で製作したサイクロン吸引機とターボファンを取付けます。
ターボファンは、サイクロン吸引機の上部にネジ止めにて固定しています。この部分はコーン状プラスチック容器の蓋となっており、蓋を開けることで溜まったゴミを取出すことが出来ます。
配線
電源部から各マイコン基板、センサーとセンサー基板、DCモーターとドライバー基板等へ配線を行います。
配線は、電源部とDCモーターはターミナルブロックを介して接続し、その他は、圧着式コンタクトターミナルに熱収縮チューブを被せたジャンパー線にて行いました。
以上で、メカ部分、ハードウェア部分の組立ては完成です。


{kind=link}